
FIRM 🦾
Unified Humanoid Fall-Safety Policy
from a Few Demonstrations
from a Few Demonstrations
1) We evaluate FIRM under different types of terrains: Grass, Red-Soil Slope, Form, and Irregular debris. FIRM is also robust under perturbation with deformable payload.
2) We compare the performance of FIRM with FIRM wo Online Adapter to better evaluate context-awareness.
We compare the quantitative performance of FIRM with two baselines that uses passive control when fall happens (i.e., Freezing Mode) and pure tracking (i.e., sparse key-frame tracking), on the simulator.
1) We evaluate real-world performance of FIRM on different terrian environments.
2) We compare the real-world performance of FIRM with a baseline that uses given trajectory (i.e., Unitree G1 Controller) on outdoor environments.
Falling is an inherent risk of humanoid mobility. Maintaining stability is thus a primary safety focus in robot control and learning, yet no existing approach fully averts loss of balance.When instability does occur, prior work addresses only isolated aspects of falling: avoiding falls, choreographing a controlled descent, or standing up afterward. Consequently, humanoid robots lack integrated strategies for impact mitigation and prompt recovery when real falls defy these scripts. We aim to go beyond keeping balance to make the entire fall-and-recovery process safe and autonomous : prevent falls when possible, reduce impact when unavoidable, and stand up when fallen. By fusing sparse human demonstrations with reinforcement learning and an adaptive diffusion-based memory of safe reactions, we learn whole-body behaviors that unify fall prevention, impact mitigation, and rapid recovery in one policy. Experiments in simulation and on a Unitree G1 demonstrate robust sim-to-real transfer, lower impact forces, and consistently fast recovery across diverse disturbances, pointing toward safer, more resilient humanoids in real environments.
We present FIRM, (short for Fall mitigation and recovery from a few human demonstrations), a control policy for the diverse, complex dynamics of humanoid falling and recovery. FIRM unifies fall mitigation and recovery in a single framework that balances safety and behavioral diversity. It operates in two stages:
1) Skill priors: a few human demonstrations are fitted and retargeted to the G1 humanoid, then sparsified into key frames. These seed skills are expanded with RL-based augmentation and post-stitching to produce diverse, damage-reducing trajectories. 2) Adaptive memory: the enriched trajectories are distilled into a diffusion model and paired with a lightweight adapter that enables real-time fall mitigation and recovery across varied conditions.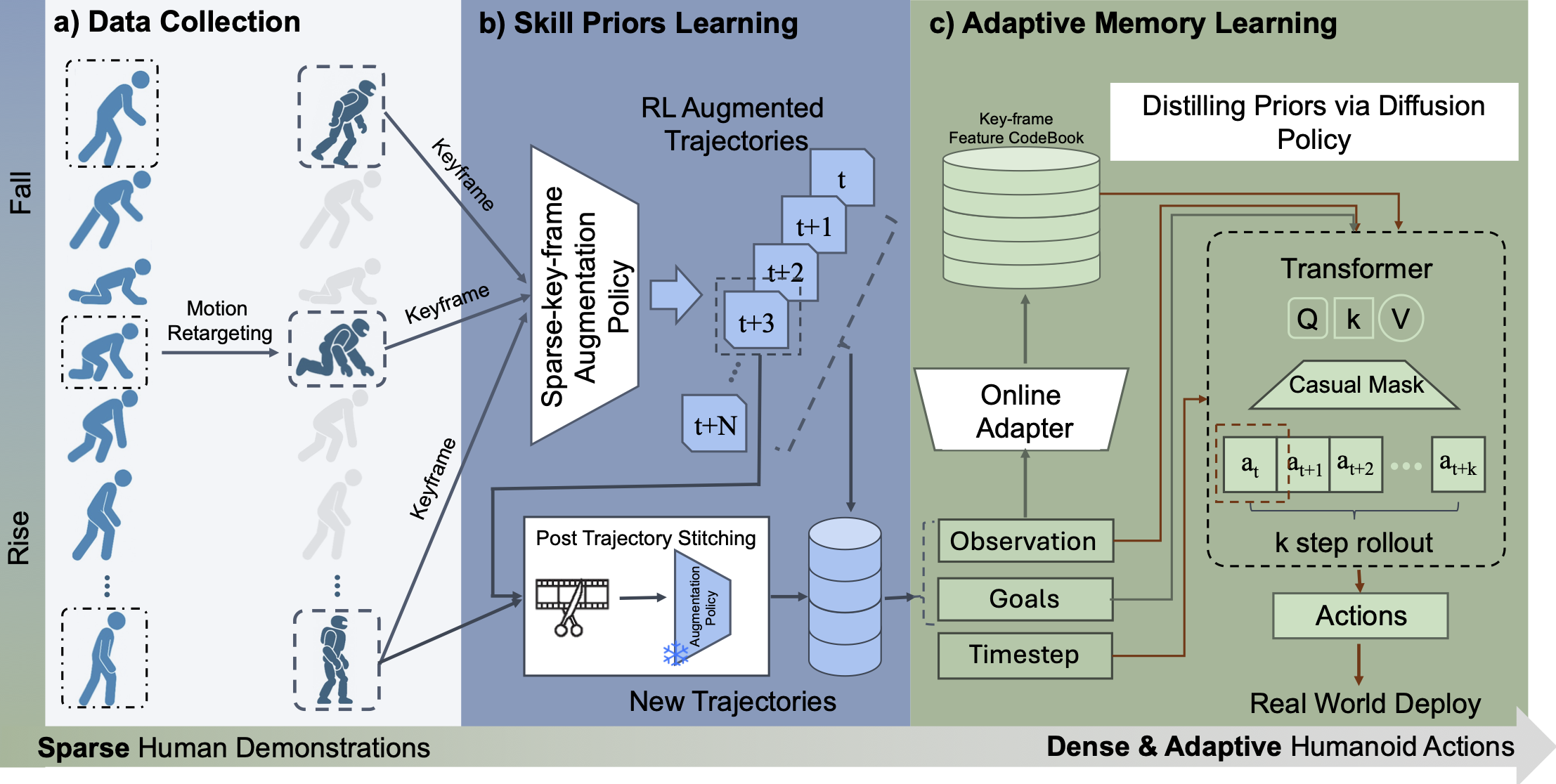
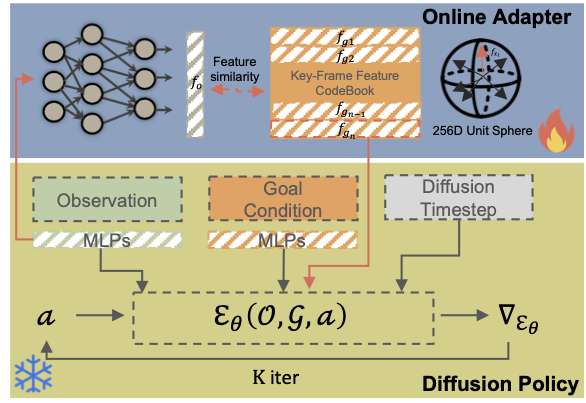
During inference, the adapter uses the history of observations to dynamically predict a feature and match with a key-frame goal feature in the code-book, and then pass the matched goal feature into the diffusion model to guide the process with context-awareness.
@article{anonymous2025firm,
title={FIRM},
author={anonymous},
journal={},
year={2025}
}

